Механика
Кинематика
Динамика
Законы сохранения
Статика
Гидростатика
Гидродинамика
Молекулярная физика
Teрмодинамика
Молекулярно-Кинетическая Теория
Термодинамика
Изменение агрегатного
состояния вещества
Электродинамика
Электростатика точечных зарядов
Проводники и диэлектрики в электрическом поле
Электроёмкость
Постоянный электрический ток
Работа и мощность тока
Электрический ток в различных средах
Магнитное поле
Электромагнитная индукция
Колебания и волны
Механические колебания
Механические волны
Электромагнитные колебания
Электромагнитные волны
Геометрическая и волновая оптика
Геометрическая оптика
Волновая оптика
Элементы специальной теории относительности
Квантовая физика
Световые кванты
Атомная физика
Элементарные частицы
Скрыть меню
Кинематика. Основные понятия кинематики
|
Механическое движение - изменение положения тела в пространстве с течением времени. Система отсчёта - совокупность тела отсчёта и связанной с ним системы координат, а так же часов. Материальная точка - идеальный объект (модель), размером которого можно пренебречь, т.е. в условиях конкретной задачи можно не учитывать размеры тела. Абсолютно твёрдое тело - тело, форма и размеры которого не меняются под воздействием других тел. Поступательное движение - движение, при котором все части тела движутся одинаково. Траектория - это линия, которое как-бы оставляет за собой тело, вследствие своего движения. Закон движения определяет положение материальной точки в любой момент времени:
Радиус-вектор
Модуль вектора перемещения: Пройденный путь l - Длинна дуги траектории, пройденной телом за время t. Вектор средней скорости  за интервал времени Δt: за интервал времени Δt:
Средняя путевая скорость за интервал времени Δt: vc = l/Δt. Мгновенная путевая скорость  определяется как предел, к которому стремится средняя скорость за бесконечно малый промежуток времени Δt,
т.е. производная вектора перемещения по времени: определяется как предел, к которому стремится средняя скорость за бесконечно малый промежуток времени Δt,
т.е. производная вектора перемещения по времени:  Проекции вектора мгновенной скорости v на оси координат:
Модуль вектора мгновенной скорости: Единица измерения скорости [v]си = м/сек Вектор среднего ускорения равен отношению изменения скорости к интервалу времени Δt, за который это изменение произошло: Мгновенным ускорением (или просто ускорением) тела называют предел отношения изменения скорости к малому промежутку времени Δt, в течение которого происходило это изменение: Проекции вектора ускорения на оси координат:
Модуль вектора ускорения:. Единица измерения ускорения [a]си = м/сек2. Равномерное прямолинейное движение
Равномерным прямолинейным называют движение, при котором траектория - прямая линия, а тело за любые равные промежутки проходит равные пути.
 , а скорость тела равна , а скорость тела равна  Проекции кинематических уравнений на ось OX:
l = s = |x - x0| = |vx|t =vt Равнопеременное прямолинейное движение
Равнопеременным прямолинейным называют движение по прямолинейной траектории с постоянным по модулю и направлению ускорением.
,
а вектор скорости тела равен и направлен параллельно вектору ускорения ā).Проекции кинематических уравнений на ось OX:
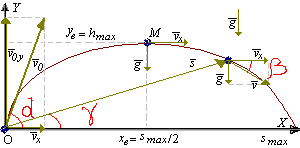
Движение тела вблизи поверхности Земли Свободным падением называют движение тела под действием притяжения Земли в отсутствие сопротивления воздуха.
Проекции вектора ускорения  и
вектора начальной скорости на оси координат: и
вектора начальной скорости на оси координат:
Уравнения движения в проекциях на оси координат:
Движение по окружности с постоянной по модулю скоростью Произвольное движение материальной точки по криволинейной траектории можно представить как движение по дугам окружностей различных радиусов R. | 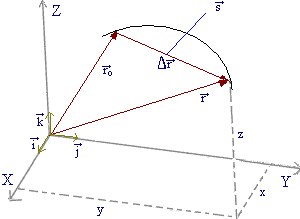
 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 , или x = x(t), y = y(t), z = z(t).
, или x = x(t), y = y(t), z = z(t).

 .
.